Jacobian matrix and determinant
| Part of a series of articles about | ||||||
| Calculus | ||||||
|---|---|---|---|---|---|---|
|
||||||
|
Specialized |
||||||
In vector calculus, the Jacobian matrix (/dʒᵻˈkoʊbiən/, /jᵻˈkoʊbiən/) is the matrix of all first-order partial derivatives of a vector-valued function. When the matrix is a square matrix, both the matrix and its determinant are referred to as the Jacobian in literature.[1]
Suppose f : ℝn → ℝm is a function which takes as input the vector x ∈ ℝn and produces as output the vector f(x) ∈ ℝm. Then the Jacobian matrix J of f is an m×n matrix, usually defined and arranged as follows:

or, component-wise:

This matrix, whose entries are functions of x, is also denoted by Df, Jf, and ∂(f1,...,fm)/∂(x1,...,xn). (Note that some literature defines the Jacobian as the transpose of the matrix given above.)
The Jacobian matrix is important because if the function f is differentiable at a point x (this is a slightly stronger condition than merely requiring that all partial derivatives exist there), then the Jacobian matrix defines a linear map ℝn → ℝm, which is the best (pointwise) linear approximation of the function f near the point x. This linear map is thus the generalization of the usual notion of derivative, and is called the derivative or the differential of f at x.
If m = n, the Jacobian matrix is a square matrix, and its determinant, a function of x1, …, xn, is the Jacobian determinant of f. It carries important information about the local behavior of f. In particular, the function f has locally in the neighborhood of a point x an inverse function that is differentiable if and only if the Jacobian determinant is nonzero at x (see Jacobian conjecture). The Jacobian determinant also appears when changing the variables in multiple integrals (see substitution rule for multiple variables).
If m = 1, f is a scalar field and the Jacobian matrix is reduced to a row vector of partial derivatives of f—i.e. the gradient of f.
These concepts are named after the mathematician Carl Gustav Jacob Jacobi (1804–1851).
Jacobian matrix
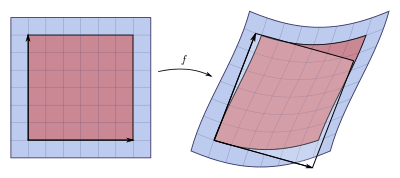
The Jacobian generalizes the gradient of a scalar-valued function of multiple variables, which itself generalizes the derivative of a scalar-valued function of a single variable. In other words, the Jacobian for a scalar-valued multivariate function is the gradient and that of a scalar-valued function of single variable is simply its derivative. The Jacobian can also be thought of as describing the amount of "stretching", "rotating" or "transforming" that a transformation imposes locally. For example, if (x′, y′) = f(x, y) is used to transform an image, the Jacobian Jf(x, y), describes how the image in the neighborhood of (x, y) is transformed.
If a function is differentiable at a point, its derivative is given in coordinates by the Jacobian, but a function doesn't need to be differentiable for the Jacobian to be defined, since only the partial derivatives are required to exist.
If p is a point in ℝn and f is differentiable at p, then its derivative is given by Jf(p). In this case, the linear map described by Jf(p) is the best linear approximation of f near the point p, in the sense that

for x close to p and where o is the little o-notation (for x → p) and ‖x − p‖ is the distance between x and p.
Compare this to a Taylor series for a scalar function of a scalar argument, truncated to first order:

In a sense, both the gradient and Jacobian are "first derivatives"—the former the first derivative of a scalar function of several variables, the latter the first derivative of a vector function of several variables.
The Jacobian of the gradient of a scalar function of several variables has a special name: the Hessian matrix, which in a sense is the "second derivative" of the function in question.
Jacobian determinant
If m=n, then f is a function from ℝn to itself and the Jacobian matrix is a square matrix. We can then form its determinant, known as the Jacobian determinant. The Jacobian determinant is occasionally referred to as "the Jacobian".
The Jacobian determinant at a given point gives important information about the behavior of f near that point. For instance, the continuously differentiable function f is invertible near a point p ∈ ℝn if the Jacobian determinant at p is non-zero. This is the inverse function theorem. Furthermore, if the Jacobian determinant at p is positive, then f preserves orientation near p; if it is negative, f reverses orientation. The absolute value of the Jacobian determinant at p gives us the factor by which the function f expands or shrinks volumes near p; this is why it occurs in the general substitution rule.
The Jacobian determinant is used when making a change of variables when evaluating a multiple integral of a function over a region within its domain. To accommodate for the change of coordinates the magnitude of the Jacobian determinant arises as a multiplicative factor within the integral. This is because the n-dimensional dV element is in general a parallelepiped in the new coordinate system, and the n-volume of a parallelepiped is the determinant of its edge vectors.
The Jacobian can also be used to solve systems of differential equations at an equilibrium point or approximate solutions near an equilibrium point.
Inverse
According to the inverse function theorem, the matrix inverse of the Jacobian matrix of an invertible function is the Jacobian matrix of the inverse function. That is, if the Jacobian of the function f : ℝn → ℝn is continuous and nonsingular at the point p in ℝn, then f is invertible when restricted to some neighborhood of p and

Conversely, if the Jacobian determinant is not zero at a point, then the function is locally invertible near this point, that is, there is a neighbourhood of this point in which the function is invertible.
The (unproved) Jacobian conjecture is related to global invertibility in the case of a polynomial function, that is a function defined by n polynomials in n variables. It asserts that, if the Jacobian determinant is a non-zero constant (or, equivalently, that it does not have any complex zero), then the function is invertible and its inverse is a polynomial function.
Critical points
If f : ℝn → ℝm is a differentiable function, a critical point of f is a point where the rank of the Jacobian matrix is not maximal. This means that the rank at the critical point is lower than the rank at some neighbour point. In other words, let k be the maximal dimension of the open balls contained in the image of f; then a point is critical if all minors of rank k of f are zero.
In the case where 1 = m = n = k, a point is critical if the Jacobian determinant is zero.
Examples
Example 1
Consider the function f : ℝ2 → ℝ2 given by

Then we have

and

and the Jacobian matrix of F is
![\mathbf {J} _{\mathbf {f} }(x,y)={\begin{bmatrix}{\dfrac {\partial f_{1}}{\partial x}}&{\dfrac {\partial f_{1}}{\partial y}}\\[1em]{\dfrac {\partial f_{2}}{\partial x}}&{\dfrac {\partial f_{2}}{\partial y}}\end{bmatrix}}={\begin{bmatrix}2xy&x^{2}\\5&\cos y\end{bmatrix}}](../I/m/7fe3958d277972f8ea78a75384d7d4c1ceceb185.svg)
and the Jacobian determinant is

Example 2: polar-Cartesian transformation
The transformation from polar coordinates (r, φ) to Cartesian coordinates (x, y), is given by the function F: ℝ+ × [0, 2π) → ℝ2 with components:

![\mathbf {J} (r,\varphi )={\begin{bmatrix}{\dfrac {\partial x}{\partial r}}&{\dfrac {\partial x}{\partial \varphi }}\\[1em]{\dfrac {\partial y}{\partial r}}&{\dfrac {\partial y}{\partial \varphi }}\end{bmatrix}}={\begin{bmatrix}\cos \varphi &-r\sin \varphi \\\sin \varphi &r\cos \varphi \end{bmatrix}}](../I/m/032138d29af7b8bc7aa38fa7b63e4112385f9274.svg)
The Jacobian determinant is equal to r. This can be used to transform integrals between the two coordinate systems:

Example 3: spherical-Cartesian transformation
The transformation from spherical coordinates (r, θ, φ) to Cartesian coordinates (x, y, z), is given by the function F: ℝ+ × [0, π] × [0, 2 π) → ℝ3 with components:

The Jacobian matrix for this coordinate change is
![\mathbf {J} _{\mathbf {F} }(r,\theta ,\varphi )={\begin{bmatrix}{\dfrac {\partial x}{\partial r}}&{\dfrac {\partial x}{\partial \theta }}&{\dfrac {\partial x}{\partial \varphi }}\\[1em]{\dfrac {\partial y}{\partial r}}&{\dfrac {\partial y}{\partial \theta }}&{\dfrac {\partial y}{\partial \varphi }}\\[1em]{\dfrac {\partial z}{\partial r}}&{\dfrac {\partial z}{\partial \theta }}&{\dfrac {\partial z}{\partial \varphi }}\end{bmatrix}}={\begin{bmatrix}\sin \theta \cos \varphi &r\cos \theta \cos \varphi &-r\sin \theta \sin \varphi \\\sin \theta \sin \varphi &r\cos \theta \sin \varphi &r\sin \theta \cos \varphi \\\cos \theta &-r\sin \theta &0\end{bmatrix}}.](../I/m/8ede8f99fde7f287598af9008cdef063f5f08577.svg)
The determinant is r2 sin θ. As an example, since dV = dx dy dz this determinant implies that the differential volume element dV = r2 sin θ dr dθ dφ. Nevertheless this determinant varies with coordinates.
Example 4
The Jacobian matrix of the function F : ℝ3 → ℝ4 with components

is
![\mathbf {J} _{\mathbf {F} }(x_{1},x_{2},x_{3})={\begin{bmatrix}{\dfrac {\partial y_{1}}{\partial x_{1}}}&{\dfrac {\partial y_{1}}{\partial x_{2}}}&{\dfrac {\partial y_{1}}{\partial x_{3}}}\\[1em]{\dfrac {\partial y_{2}}{\partial x_{1}}}&{\dfrac {\partial y_{2}}{\partial x_{2}}}&{\dfrac {\partial y_{2}}{\partial x_{3}}}\\[1em]{\dfrac {\partial y_{3}}{\partial x_{1}}}&{\dfrac {\partial y_{3}}{\partial x_{2}}}&{\dfrac {\partial y_{3}}{\partial x_{3}}}\\[1em]{\dfrac {\partial y_{4}}{\partial x_{1}}}&{\dfrac {\partial y_{4}}{\partial x_{2}}}&{\dfrac {\partial y_{4}}{\partial x_{3}}}\end{bmatrix}}={\begin{bmatrix}1&0&0\\0&0&5\\0&8x_{2}&-2\\x_{3}\cos x_{1}&0&\sin x_{1}\end{bmatrix}}.](../I/m/c8cdd61024fb8153b850520350a6a90648e454a9.svg)
This example shows that the Jacobian need not be a square matrix.
Example 5
The Jacobian determinant of the function F : ℝ3 → ℝ3 with components

is

From this we see that F reverses orientation near those points where x1 and x2 have the same sign; the function is locally invertible everywhere except near points where x1 = 0 or x2 = 0. Intuitively, if one starts with a tiny object around the point (1, 2, 3) and apply F to that object, one will get a resulting object with approximately 40 × 1 × 2 = 80 times the volume of the original one, with orientation reversed.
Other uses
The Jacobian serves as a linearized design matrix in statistical regression and curve fitting; see non-linear least squares.
Dynamical systems
Consider a dynamical system of the form x′ = F(x), where x′ is the (component-wise) time derivative of x, and F : ℝn → ℝn is differentiable. If F(x0) = 0, then x0 is a stationary point (also called a critical point; this is not to be confused with fixed points). The behavior of the system near a stationary point is related to the eigenvalues of JF(x0), the Jacobian of F at the stationary point.[2] Specifically, if the eigenvalues all have real parts that are negative, then the system is stable near the stationary point, if any eigenvalue has a real part that is positive, then the point is unstable. If the largest real part of the eigenvalues is zero, the Jacobian matrix does not allow for an evaluation of the stability.
Newton's method
A system of coupled nonlinear equations can be solved iteratively by Newton's method. This method uses the Jacobian matrix of the system of equations.
See also
References
Further reading
- Gandolfo, Giancarlo (1996). Economic Dynamics (Third ed.). Berlin: Springer. pp. 305–330. ISBN 3-540-60988-1.
External links
- Hazewinkel, Michiel, ed. (2001), "Jacobian", Encyclopedia of Mathematics, Springer, ISBN 978-1-55608-010-4
- Mathworld A more technical explanation of Jacobians