Linearization
In mathematics linearization refers to finding the linear approximation to a function at a given point. In the study of dynamical systems, linearization is a method for assessing the local stability of an equilibrium point of a system of nonlinear differential equations or discrete dynamical systems.[1] This method is used in fields such as engineering, physics, economics, and ecology.
Linearization of a function
Linearizations of a function are lines—usually lines that can be used for purposes of calculation. Linearization is an effective method for approximating the output of a function at any based on the value and slope of the function at , given that is differentiable on (or ) and that is close to . In short, linearization approximates the output of a function near .




![[a,b]](../I/m/9c4b788fc5c637e26ee98b45f89a5c08c85f7935.svg)
![[b,a]](../I/m/e3015146003c7dab01d939e34e07159fa9604bc3.svg)


For example, . However, what would be a good approximation of ?


For any given function , can be approximated if it is near a known differentiable point. The most basic requisite is that , where is the linearization of at . The point-slope form of an equation forms an equation of a line, given a point and slope . The general form of this equation is: .





Using the point , becomes . Because differentiable functions are locally linear, the best slope to substitute in would be the slope of the line tangent to at .


While the concept of local linearity applies the most to points arbitrarily close to , those relatively close work relatively well for linear approximations. The slope should be, most accurately, the slope of the tangent line at .
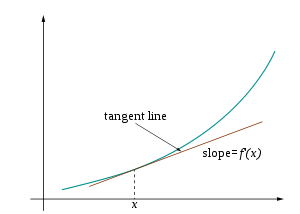
Visually, the accompanying diagram shows the tangent line of at . At , where is any small positive or negative value, is very nearly the value of the tangent line at the point .




The final equation for the linearization of a function at is:

For , . The derivative of is , and the slope of at is .



Example
To find , we can use the fact that . The linearization of at is , because the function defines the slope of the function at . Substituting in , the linearization at 4 is . In this case , so is approximately . The true value is close to 2.00024998, so the linearization approximation has a relative error of less than 1 millionth of a percent.








Linearization of a multivariable function
The equation for the linearization of a function at a point is:



The general equation for the linearization of a multivariable function at a point is:



where is the vector of variables, and is the linearization point of interest .[2]

Uses of linearization
Linearization makes it possible to use tools for studying linear systems to analyze the behavior of a nonlinear function near a given point. The linearization of a function is the first order term of its Taylor expansion around the point of interest. For a system defined by the equation
- ,

the linearized system can be written as

where is the point of interest and is the Jacobian of evaluated at .



Stability analysis
In stability analysis of autonomous systems, one can use the eigenvalues of the Jacobian matrix evaluated at a hyperbolic equilibrium point to determine the nature of that equilibrium. This is the content of linearization theorem. For time-varying systems, the linearization requires additional justification.[3]
Microeconomics
In microeconomics, decision rules may be approximated under the state-space approach to linearization.[4] Under this approach, the Euler equations of the utility maximization problem are linearized around the stationary steady state.[4] A unique solution to the resulting system of dynamic equations then is found.[4]
Optimization
In Mathematical optimization, cost functions and non-linear components within can be linearized in order to apply a linear solving method such as the Simplex algorithm. The optimized result is reached much more efficiently and is deterministic as a global optimum.
See also
- Linear stability
- Tangent stiffness matrix
- Stability derivatives
- Linearization theorem
- Taylor approximation
- Functional equation (L-function)
References
- ↑ The linearization problem in complex dimension one dynamical systems at Scholarpedia
- ↑ Linearization. The Johns Hopkins University. Department of Electrical and Computer Engineering
- ↑ G.A. Leonov, N.V. Kuznetsov, Time-Varying Linearization and the Perron effects, International Journal of Bifurcation and Chaos, Vol. 17, No. 4, 2007, pp. 1079-1107
- 1 2 3 Moffatt, Mike. (2008) About.com State-Space Approach Economics Glossary; Terms Beginning with S. Accessed June 19, 2008.