Continuum percolation theory
In mathematics and probability theory, continuum percolation theory is a branch of mathematics that extends discrete percolation theory to continuous space (often Euclidean space Rn ). More specifically, the underlying points of discrete percolation form types of lattices whereas the underlying points of continuum percolation are often randomly positioned in some continuous space and form a type of point process. For each point, a random shape is frequently placed on it and the shapes overlap each with other to form clumps or components. As in discrete percolation, a common research focus of continuum percolation is studying the conditions of occurrence for infinite or giant components.[1][2] Other shared concepts and analysis techniques exist in these two types of percolation theory as well as the study of random graphs and random geometric graphs.
Continuum percolation arose from an early mathematical model for wireless networks,[2][3] which, with the rise of several wireless network technologies in recent years, has been generalized and studied in order to determine the theoretical bounds of information capacity and performance in wireless networks.[4][5] In addition to this setting, continuum percolation has gained application in other disciplines including biology, geology, and physics, such as the study of porous material and semiconductors, while becoming a subject of mathematical interest in its own right.[6]
Early history
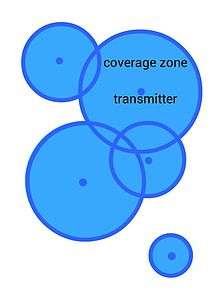
In the early 1960s Edgar Gilbert [3] proposed a mathematical model in wireless networks that gave rise to the field of continuum percolation theory, thus generalizing discrete percolation.[2] The underlying points of this model, sometimes known as the Gilbert disk model, were scattered uniformly in the infinite plane R2 according to a homogeneous Poisson process. Gilbert, who had noticed similarities between discrete and continuum percolation,[7] then used concepts and techniques from the probability subject of branching processes to show that a threshold value existed for the infinite or "giant" component.
Definitions and terminology
The exact names, terminology, and definitions of these models may vary slightly depending on the source, which is also reflected in the use of point process notation.
Common models
A number of well-studied models exist in continuum percolation, which are often based on homogeneous Poisson point processes.
Disk model
Consider a collection of points in the plane R2 that form a homogeneous Poisson process with constant (point) density . For each point of the Poisson process (i.e. ), place a disk with its center located at the point . If each disk has a random radius (from a common distribution ) that is independent of all the other radii and all the underlying points , then the resulting mathematical structure is known as a random disk model.







Boolean model
Given a random disk model, if the set union of all the disks is taken, then the resulting structure is known as a Boolean–Poisson model (also known as simply the Boolean model),[8] which is a commonly studied model in continuum percolation [1] as well stochastic geometry.[8] If all the radii are set to some common constant, say, r>0, then the resulting model is sometimes known as the Gilbert disk (Boolean) model.[9] '



Germ-grain model
The disk model can be generalized to more arbitrary shapes where, instead of a disk, a random compact (hence bounded and closed in R2) shape is placed on each point . Again, each shape has a common distribution and independent to all other shapes and the underlying (Poisson) point process. This model is known as the germ-grain model where the underlying points are the "germs" and the random compact shapes are the "grains". The set union of all the shapes forms a Boolean germ-grain model. Typical choices for the grains include disks, random polygon and segments of random length.[8]

Boolean models are also examples of stochastic processes known as coverage processes.[10] The above models can be extended from the plane R2 to general Euclidean space Rn.
Components and criticality
In the Boolean–Poisson model, disks there can be isolated groups or clumps of disks that do not contact any other clumps of disks. These clumps are known as components. If the area (or volume in higher dimensions) of a component is infinite, one says it is an infinite or "giant" component. A major focus of percolation theory is establishing the conditions when giant components exist in models, which has parallels with the study of random networks. If no big component exists, the model is said to be sub-critical. The conditions of giant component criticality naturally depend on parameters of the model such as the density of the underlying point process.
Applications
The applications of percolation theory are various and range from material sciences to wireless communication systems. Often the work involves showing that a type of phase transition occurs in the system.
Wireless networks
Wireless networks are sometimes best represented with stochastic models owing to their complexity and unpredictability, hence continuum percolation have been used to develop stochastic geometry models of wireless networks. For example, the tools of continuous percolation theory and coverage processes have been used to study the coverage and connectivity of sensor networks.[11][12] One of the main limitations of these networks is energy consumption where usually each node has a battery and an embedded form of energy harvesting. To reduce energy consumption in sensor networks, various sleep schemes have been suggested that entail having a sub-collection of nodes go into a low energy-consuming sleep mode. These sleep schemes obviously affect the coverage and connectivity of sensor networks. Simple power-saving models have been proposed such as the simple uncoordinated `blinking' model where (at each time interval) each node independently powers down (or up) with some fixed probability. Using the tools of percolation theory, a blinking Boolean Poisson model has been analyzed to study the latency and connectivity effects of such a simple power scheme.[11]
See also
Textbooks
- Continuum percolation: Meester and Roy.[1]
- Discrete and continuum percolation in wireless networks: Meester and Franceschetti.[2]
References
- 1 2 3 R. Meester. Continuum percolation, volume 119. Cambridge University Press, 1996.
- 1 2 3 4 M. Franceschetti and R. Meester. Random networks for communication: from statistical physics to information systems, volume 24. Cambridge University Press, 2007.
- 1 2 E. N. Gilbert. Random plane networks. Journal of the Society for Industrial \& Applied Mathematics, 9(4):533–543, 1961.
- ↑ O. Dousse, F. Baccelli, and P. Thiran. Impact of interferences on connectivity in ad hoc networks. Networking, IEEE/ACM Transactions on, 13(2):425–436, 2005.
- ↑ O. Dousse, M. Franceschetti, N. Macris, R. Meester, and P. Thiran. Percolation in the signal to interference ratio graph. Journal of Applied Probability, pages 552–562, 2006.
- ↑ I. Balberg. Recent developments in continuum percolation. Philosophical Magazine Part B, 56(6):991–1003, 1987.
- ↑ P. Hall. On continuum percolation. The Annals of Probability, 13(4):1250–1266, 1985.
- 1 2 3 D. Stoyan, W. S. Kendall, J. Mecke, and L. Ruschendorf. Stochastic geometry and its applications, volume 2. Wiley Chichester, 1995.
- ↑ Balister, Paul and Sarkar, Amites and Bollobás, Béla, Percolation, connectivity, coverage and colouring of random geometric graphs, Handbook of Large-Scale Random Networks, 117--142, 2008
- ↑ P. Hall. Introduction to the theory of coverage processes, volume 1. Wiley New York, 1988.
- 1 2 O. Dousse, P. Mannersalo, and P. Thiran. Latency of wireless sensor networks with uncoordinated power saving mechanisms. In Proceedings of the 5th ACM international symposium on Mobile ad hoc networking and computing, pages 109–120. ACM, 2004.
- ↑ C. Gui and P. Mohapatra. Power conservation and quality of surveillance in target tracking sensor networks. In Proceedings of the 10th annual international conference on Mobile computing and networking, pages 129–143. ACM, 2004.