Jansen's linkage

Theo Jansen's linkage. When the blue line at the right end of the picture is driven in a clockwise rotary motion, the leg (blue triangle at the bottom) executes a walking motion. Relative (dimensionless) proportions shown.

Theo Jansen's kinetic sculpture Strandbeest. A wind-driven walking machine.
The Jansen's linkage is a leg mechanism designed by the kinetic sculptor Theo Jansen to simulate a smooth walking motion[1] Jansen has used his mechanism in a variety of kinetic sculptures which are known as Strandbeests. Jansen's linkage bears artistic as well as mechanical merit for its simulation of organic walking motion using a simple rotary input.[2]
Illustrations
 Animation of one leg
Animation of one leg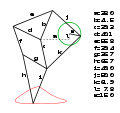 length of the rods
length of the rods Animation of six legs
Animation of six legs
References
- ↑ Edgar Alonso Martínez García (6 October 2015). "13". Numerical Modelling in Robotics. OmniaScience. p. 336. ISBN 978-84-942118-8-1.
- ↑ Giesbrecht, Daniel (8 April 2010). Design and optimization of a one-degree-of-freedom eight-bar leg mechanism for a walking machine (Thesis). University of Manitoba. Retrieved 27 July 2016.
While legged walking mechanisms have been designed and built based on engineering theories, they have also attracted much attention from the art fields. The kinetic sculpture “Wind Beast” is a multi-legged walking mechanism powered by wind. It was created by Mr. Theo Jansen, a Dutch kinetic sculptor. The mechanism has many advantages from the design viewpoint, such as: it has a SDOF, a crank as an input link and an ovoid foot path. Also, two legs are in pair and are mirrored, where they share the same crank as the input link. This is beneficial because a central shaft can be used to operate all the legs without adding extra actuators.
| Wikimedia Commons has media related to Jansen's linkage. |
External links
- Animation of Jansen mechanism: mechanisms101.com
- Animations and Comparison of Jansen and Klann linkages: mechanicalspider.com
- Theo Jansen's STRANDBEEST
- Theo Jansens Strandbeest-Mechanismus (German)
- Strandbeest created with GeoGebra
- 2D ShaderToy
- 3D ShaderToy
This article is issued from Wikipedia - version of the 11/2/2016. The text is available under the Creative Commons Attribution/Share Alike but additional terms may apply for the media files.