Epipolar geometry
Two cameras take a picture of the same scene from different points of view. The epipolar geometry then describes the relation between the two resulting views.
Epipolar geometry is the geometry of stereo vision. When two cameras view a 3D scene from two distinct positions, there are a number of geometric relations between the 3D points and their projections onto the 2D images that lead to constraints between the image points. These relations are derived based on the assumption that the cameras can be approximated by the pinhole camera model.
Epipolar geometry
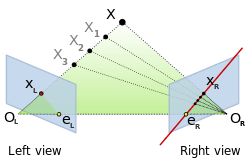
The figure below depicts two pinhole cameras looking at point X. In real cameras, the image plane is actually behind the focal center, and produces an image that is the symmetry about the focal center of the lens. Here, however, the problem is simplified by placing a virtual image plane in front of the focal center i.e optical center of each camera lens to produce an image not transformed by the symmetry. OL and OR represent the centers of symmetry of the two cameras lenses. X represents the point of interest in both cameras. Points xL and xR are the projections of point X onto the image planes.
Each camera captures a 2D image of the 3D world. This conversion from 3D to 2D is referred to as a perspective projection and is described by the pinhole camera model. It is common to model this projection operation by rays that emanate from the camera, passing through its focal center. Note that each emanating ray corresponds to a single point in the image.
Epipole or epipolar point
Since the optical centers of the cameras lenses are distinct, each center projects onto a distinct point into the other camera's image plane. These two image points are denoted by eL and eR and are called epipoles or epipolar points. Both epipoles eL and eR in their respective image planes and both optical centers OL and OR lie on a single 3D line.
Epipolar line
The line OL–X is seen by the left camera as a point because it is directly in line with that camera's lens optical center. However, the right camera sees this line as a line in its image plane. That line (eR–xR) in the right camera is called an epipolar line. Symmetrically, the line OR–X seen by the right camera as a point is seen as epipolar line eL–xLby the left camera.
An epipolar line is a function of the position of point X in the 3D space, i.e. as X varies a set of epipolar lines is generated in both images. Since the 3D line OL–X passes through the optical center of the lens OL, the corresponding epipolar line in the right image must pass through the epipole eR (and correspondingly for epipolar lines in the left image). All epipolar lines in one image contains the epipolar point of that image. In fact, any line which contains the epipolar point is an epipolar line since it can be derived from some 3D point X.
Epipolar plane
As an alternative visualization, consider the points X, OL & OR that form a plane called the epipolar plane. The epipolar plane intersects each camera's image plane where it forms lines—the epipolar lines. All epipolar planes and epipolar lines intersect the epipole regardless of where X is located.
Epipolar constraint and triangulation
If the relative position of the two cameras is known, this leads to two important observations:
- If the projection point xL is known, then the epipolar line eR–xR is known and the point X projects into the right image, on a point xR which must lie on this particular epipolar line. This means that for each point observed in one image the same point must be observed in the other image on a known epipolar line. This provides an epipolar constraint: the projection of X on the right camera plane xR must be contained in the eR–xR epipolar line. Note also that all points X e.g X1, X2, X3 on the OL–XL line will verify that constraint. It means that it is possible to test if two points correspond to the same 3D point. Epipolar constraints can also be described by the essential matrix or the fundamental matrix between the two cameras.
- If the points xL and xR are known, their projection lines are also known. If the two image points correspond to the same 3D point X the projection lines must intersect precisely at X. This means that X can be calculated from the coordinates of the two image points, a process called triangulation.
Simplified cases

The epipolar geometry is simplified if the two camera image planes coincide. In this case, the epipolar lines also coincide (EL–PL = ER–PR). Furthermore, the epipolar lines are parallel to the line OL–OR between the centers of projection, and can in practice be aligned with the horizontal axes of the two images. This means that for each point in one image, its corresponding point in the other image can be found by looking only along a horizontal line. If the cameras cannot be positioned in this way, the image coordinates from the cameras may be transformed to emulate having a common image plane. This process is called image rectification.
Epipolar geometry of pushbroom sensor
In contrast to the conventional frame camera which uses a two-dimensional CCD, pushbroom camera adopts an array of one-dimensional CCDs to produce long continuous image strip which is called "image carpet". Epipolar geometry of this sensor is quite different from that of frame cameras. First, the epipolar line of pushbroom sensor is not straight, but hyperbola-like curve. Second, epipolar 'curve' pair does not exist.[1]
See also
- 3D reconstruction
- 3D reconstruction from multiple images
- 3D scanner
- Binocular disparity
- Photogrammetry
References
- ↑ Jaehong Oh. "Novel Approach to Epipolar Resampling of HRSI and Satellite Stereo Imagery-based Georeferencing of Aerial Images", 2011, accessed 2011-08-05.
Further reading
- Richard Hartley and Andrew Zisserman (2003). Multiple View Geometry in computer vision. Cambridge University Press. ISBN 0-521-54051-8.
- Quang-Tuan Luong. "Learning Epipolar Geometry". Artificial Intelligence Center. SRI International. Retrieved 2007-03-04.
- Robyn Owens. "Epipolar geometry". Retrieved 2007-03-04.
- Linda G. Shapiro and George C. Stockman (2001). Computer Vision. Prentice Hall. pp. 395–403. ISBN 0-13-030796-3.
- Vishvjit S. Nalwa (1993). A Guided Tour of Computer Vision. Addison Wesley. pp. 216–240. ISBN 0-201-54853-4.
- Roberto Cipolla and Peter Giblin (2000). Visual motion of curves and surfaces. Cambridge University Press, Cambridge. ISBN 0-521-63251-X.