Conformal map
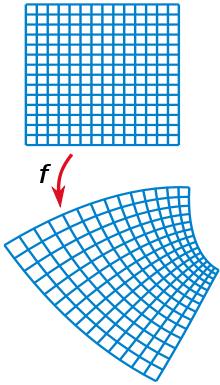
In mathematics, a conformal map is a function that preserves angles locally. In the most common case, the function has a domain and an image in the complex plane.
More formally, a map
- f : U → V with U, V ⊆ ℂn
is called conformal (or angle-preserving) at a point u0 if it preserves oriented angles between curves through u0 with respect to their orientation (i.e. not just the magnitude of the angle). Conformal maps preserve both angles and the shapes of infinitesimally small figures, but not necessarily their size or curvature.
The conformal property may be described in terms of the Jacobian derivative matrix of a coordinate transformation. If the Jacobian matrix of the transformation is everywhere a scalar times a rotation matrix, then the transformation is conformal.
Conformal maps can be defined between domains in higher-dimensional Euclidean spaces, and more generally on a Riemannian or semi-Riemannian manifold.
Complex analysis
An important family of examples of conformal maps comes from complex analysis. If U is an open subset of the complex plane ℂ, then a function
- f : U → ℂ
is conformal if and only if it is holomorphic and its derivative is everywhere non-zero on U. If f is antiholomorphic (that is, the conjugate to a holomorphic function), it still preserves angles, but it reverses their orientation.
In the literature, there is another definition of conformal maps; a map f defined on an open set is said to be conformal if it is one-to-one and holomorphic. Since a one-to-one map defined on a non-empty open set cannot be constant, the open mapping theorem forces the inverse function (defined on the image of f) to be holomorphic. Thus, under this definition, a map is conformal if and only if it is biholomorphic. The two definitions for conformal maps are not equivalent. Being one-to-one and holomorphic implies having a non-zero derivative. However, the exponential function is a holomorphic function with a non-zero derivative, but is not one-to-one since it is periodic.[1]
The Riemann mapping theorem, one of the profound results of complex analysis, states that any non-empty open simply connected proper subset of ℂ admits a bijective conformal map to the open unit disk in ℂ.
A map of the extended complex plane (which is conformally equivalent to a sphere) onto itself is conformal if and only if it is a Möbius transformation. Again, for the conjugate, angles are preserved, but orientation is reversed.
An example of the latter is taking the reciprocal of the conjugate, which corresponds to circle inversion with respect to the unit circle. This can also be expressed as taking the reciprocal of the radial coordinate in circular coordinates, keeping the angle the same. See also inversive geometry.
Riemannian geometry
In Riemannian geometry, two Riemannian metrics and on smooth manifold are called conformally equivalent if for some positive function on . The function is called the conformal factor.





A diffeomorphism between two Riemannian manifolds is called a conformal map if the pulled back metric is conformally equivalent to the original one. For example, stereographic projection of a sphere onto the plane augmented with a point at infinity is a conformal map.
One can also define a conformal structure on a smooth manifold, as a class of conformally equivalent Riemannian metrics.
Higher-dimensional Euclidean space
A classical theorem of Joseph Liouville called Liouville's theorem shows the higher-dimensions have less varied conformal maps:
Any conformal map on a portion of Euclidean space of dimension greater than 2 can be composed from three types of transformation: a homothetic transformation, an isometry, and a special conformal transformation. (A special conformal transformation is the composition of a reflection and an inversion in a sphere.) Thus, the set of conformal transformations in spaces of dimension greater than 2 is much more restricted than in the planar case, where the Riemann mapping theorem provides a large set of conformal transformations.
Uses
If a function is harmonic (that is, it satisfies Laplace's equation ) over a plane domain (which is two-dimensional), and is transformed via a conformal map to another plane domain, the transformation is also harmonic. For this reason, any function which is defined by a potential can be transformed by a conformal map and still remain governed by a potential. Examples in physics of equations defined by a potential include the electromagnetic field, the gravitational field, and, in fluid dynamics, potential flow, which is an approximation to fluid flow assuming constant density, zero viscosity, and irrotational flow. One example of a fluid dynamic application of a conformal map is the Joukowsky transform.

Conformal mappings are invaluable for solving problems in engineering and physics that can be expressed in terms of functions of a complex variable but that exhibit inconvenient geometries. By choosing an appropriate mapping, the analyst can transform the inconvenient geometry into a much more convenient one. For example, one may wish to calculate the electric field, , arising from a point charge located near the corner of two conducting planes separated by a certain angle (where is the complex coordinate of a point in 2-space). This problem per se is quite clumsy to solve in closed form. However, by employing a very simple conformal mapping, the inconvenient angle is mapped to one of precisely pi radians, meaning that the corner of two planes is transformed to a straight line. In this new domain, the problem (that of calculating the electric field impressed by a point charge located near a conducting wall) is quite easy to solve. The solution is obtained in this domain, , and then mapped back to the original domain by noting that was obtained as a function (viz., the composition of and ) of , whence can be viewed as , which is a function of , the original coordinate basis. Note that this application is not a contradiction to the fact that conformal mappings preserve angles, they do so only for points in the interior of their domain, and not at the boundary.






A large group of conformal maps for relating solutions of Maxwell’s equations was identified by Ebenezer Cunningham (1908) and Harry Bateman (1910) (see spherical wave transformation). Their training at Cambridge University had given them facility with the method of image charges and associated methods of images for spheres and inversion. As recounted by Andrew Warwick (2003) Masters of Theory: [2]
- Each four-dimensional solution could be inverted in a four-dimensional hyper-sphere of pseudo-radius K in order to produce a new solution.
Warwick highlights (pages 404 to 424) this "new theorem of relativity" as a Cambridge response to Einstein, and as founded on exercises using the method of inversion, such as found in James Hopwood Jeans textbook Mathematical Theory of Electricity and Magnetism.
In cartography, several named map projections, including the Mercator projection and the stereographic projection are conformal. These enjoy the property that the distortion of shapes can be made as small as desired by making the diameter of the mapped region small enough. See Conformal map projection.
In general relativity, conformal maps are the simplest and thus most common type of causal transformations. Physically, these describe different universes in which all the same events and interactions are still (causally) possible, but a new additional force is necessary to effect this (that is, replication of all the same trajectories would necessitate departures from geodesic motion because the metric is different). It is often used to try to make models amenable to extension beyond curvature singularities, for example to permit description of the universe even before the big bang.
Alternative angles
A conformal map is called that because it preserves the shapes of things (at an infinitesimal scale). The term is based on the Latin prefix com- (together, with, near) and the Latin noun forma (shape, appearance).[3][4][5] The presumption often is that the shape being preserved is measured by the standard Euclidean angle, say parameterized in degrees or radians. However, in plane mapping there are two other angles to consider: the hyperbolic angle and the slope, which is the analogue of angle for dual numbers.
Suppose is a mapping of surfaces parameterized by (x,y) and (u,v). The Jacobian matrix of is formed by the four partial derivatives of u and v with respect to x and y.


If the Jacobian g has a non-zero determinant, then is "conformal in the generalized sense" with respect to one of the three angle types, depending on the real matrix expressed by the Jacobian g.
Indeed, any such g lies in a particular planar commutative subring, and g has a polar decomposition determined by parameters of radial and angular nature. The radial parameter corresponds to a similarity mapping and can be taken as 1 for purposes of conformal examination. The angular parameter of g is one of the three types, shear, hyperbolic, or Euclidean:
- When the subring is isomorphic to the dual number plane, then g acts as a shear mapping and preserves the dual angle.
- When the subring is isomorphic to the split-complex number plane, then g acts as a squeeze mapping and preserves the hyperbolic angle.
- When the subring is isomorphic to the ordinary complex number plane, then g acts as a rotation and preserves the Euclidean angle.
While describing analytic functions of a bireal variable, U. Bencivenga and G. Fox have written about conformal maps that preserve the hyperbolic angle. In general, a linear fractional transformation on any one of the types of complex plane listed provides a conformal map.
See also
- Schwarz–Christoffel mapping – a conformal transformation of the upper half-plane onto the interior of a simple polygon.
- Penrose diagram
- Carathéodory's theorem – A conformal map extends continuously to the boundary.
| Wikimedia Commons has media related to Category:Conformal mapping. |
References
- ↑ Richard M. Timony (2004) Riemann mapping theorem from Trinity College, Dublin
- ↑ Warwick, Andrew (2003). Masters of theory : Cambridge and the rise of mathematical physics. Chicago: University of Chicago press. ISBN 978-0226873756.
- ↑ "conformal – definition and meaning". Wordnik.com. Retrieved 2013-09-05.
- ↑ "English etymology of conformal". myEtymology.com. Retrieved 2013-09-05.
- ↑ "conformal – Memidex dictionary/thesaurus". Memidex.com. 2013-06-26. Retrieved 2013-09-05.
Further reading
- Ahlfors, Lars V. (1973), Conformal invariants: topics in geometric function theory, New York: McGraw–Hill Book Co., MR 0357743
- Chanson, H. (2009), Applied Hydrodynamics: An Introduction to Ideal and Real Fluid Flows, CRC Press, Taylor & Francis Group, Leiden, The Netherlands, 478 pages, ISBN 978-0-415-49271-3
- E.P. Dolzhenko (2001), "Conformal mapping", in Hazewinkel, Michiel, Encyclopedia of Mathematics, Springer, ISBN 978-1-55608-010-4
- Rudin, Walter (1987), Real and complex analysis (3rd ed.), New York: McGraw–Hill Book Co., ISBN 978-0-07-054234-1, MR 924157
- Churchill, Ruel V. (1974), Complex Variables and Applications, New York: McGraw–Hill Book Co., ISBN 0-07-010855-2
- Weisstein, Eric W. "Conformal Mapping". MathWorld.
External links
- Conformal Mapping Module by John H. Mathews
- interactive visualizations of many conformal maps
- Conformal Maps by Michael Trott, Wolfram Demonstrations Project.
- Java applet by Jürgen Richter-Gebert using Cinderella.
- Java applet by Christian Mercat to deform pictures (link broken, applet available under ComplexMapStill.jar); MacOSX Java applet that deforms the video flux from the webcam.
- Conformal Mapping images of current flow in different geometries without and with magnetic field by Gerhard Brunthaler.
- Conformal Transformation: from Circle to Square.
- Online Conformal Map Grapher.