Beagle 2
|
Replica of the Beagle 2 at the London Science Museum | |
| Mission type | Geochemistry and astrobiology Mars lander |
|---|---|
| Operator | National Space Centre, UK |
| COSPAR ID | 2003-022C[1] |
| Website |
beagle2 |
| Mission duration | 6 months (planned)[2] |
| Spacecraft properties | |
| Landing mass | 33.2 kg (73 lb) |
| Payload mass | 9 kg (20 lb) science instruments |
| Dimensions |
Folded: 1 m diameter Unfolded: 1.9 m diameter Height: 12 cm[3] |
| Power | 60 W[3] |
| Start of mission | |
| Launch date | 2 June 2003, 07:45 UTC |
| Rocket | Soyuz-FG / Fregat |
| Launch site | Baikonur Cosmodrome |
| Contractor | EADS Astrium |
| Mars lander | |
| Landing date | 25 December 2003, 02:45 UTC |
| Landing site |
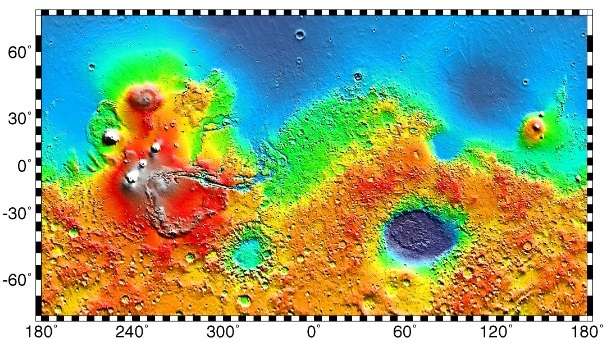
Isidis Planitia, Mars 11°31′35″N 90°25′46″E / 11.5265°N 90.4295°E |

The Beagle 2 was a British Mars lander that was transported by the European Space Agency's 2003 Mars Express mission. It was a failed astrobiology mission that would have looked for past life on the shallow surface of Mars.
The spacecraft was successfully deployed from the Mars Express on 19 December 2003 and was scheduled to land on the surface of Mars on 25 December; however, no contact was received at the expected time of landing on Mars, with the ESA declaring the mission lost in February 2004, after numerous attempts to contact the spacecraft were made.[4]
The Beagle 2's fate remained a mystery until January 2015 when it was located intact on the surface of Mars in a series of images from NASA's Mars Reconnaissance Orbiter HiRISE camera.[5][6] The images suggest that two of the spacecraft's four solar panels failed to deploy, blocking the spacecraft's communications antenna.
The Beagle 2 is named after HMS Beagle, the ship used by Charles Darwin.
Background

The Beagle 2 was conceived by a group of British academics headed by Professor Colin Pillinger of the Open University, in collaboration with the University of Leicester. The project was designed and developed by several UK academics and companies.[7] Its purpose was to search for signs of life on Mars, past or present,[8] and its name reflected this goal, as Pillinger explained:
"HMS Beagle was the ship that took Darwin on his voyage around the world in the 1830s and led to our knowledge about life on Earth making a real quantum leap. We hope Beagle 2 will do the same thing for life on Mars."
Isidis Planitia, an enormous flat sedimentary basin that overlies the boundary between the ancient highlands and the northern plains of Mars, was chosen as the landing site and a 50 by 8 kilometres (31.1 by 5.0 mi) ellipse centered on 11°32′N 90°30′E / 11.53°N 90.50°E was selected.[8] The lander was expected to operate for about 180 days and an extended mission of up to one Martian year (687 Earth days) was thought possible. The Beagle 2 lander objectives were to characterise the landing site geology, mineralogy, geochemistry and oxidation state, the physical properties of the atmosphere and surface layers, collect data on Martian meteorology, climate, and search for biosignatures.
The Principal Investigator, Colin Pillinger, set up a consortium to design and build the Beagle 2. The principal members and their initial responsibilities were:[9]
- Open University – Consortium leader & scientific experiments
- University of Leicester – Project management, Mission management, Flight Operations Team, instrument management, and scientific experiments
 Colin Pillinger, leader of the Beagle 2 project, pictured in 2009
Colin Pillinger, leader of the Beagle 2 project, pictured in 2009 - Astrium – Main industrial partner
- Martin-Baker – Entry, descent and landing system
- Logica – Cruise, entry, descent and landing software
- SCISYS – Ground segment and lander software
- University of Wales, Aberystwyth – Robotic arm
- McLaren Applied Technologies - composite materials for the solar panels[10]
In 2000, when the main development phase started, Astrium took over responsibility for programme management, and Leicester assumed responsibility for mission management which involved the preparations for the operations post launch and the operations control centre.
In an effort to publicise the project and gain financial support, its designers sought and received the endorsement and participation of British artists. The mission's call-sign was composed by the band Blur, and the 'test card' (Calibration Target Plate) intended for calibrating Beagle 2's cameras and spectrometers after landing was painted by Damien Hirst.
The Lander Operations Control Centre (LOCC) was located at the National Space Centre in Leicester, from which the spacecraft was being controlled, and was visible to the public visiting the centre. The control centre included operational systems for controlling Beagle 2, analysis tools for processing engineering and scientific telemetry, virtual reality tools for preparing activity sequences, communications systems, and the Ground Test Model (GTM). The GTM was composed of various builds of the Beagle 2 systems, collected together to provide a full set of lander electronics. The GTM was used nearly continuously to validate the engineering and science commands, to rehearse the landing sequence, and to validate the onboard software.[11]
Funding:[12]
The Beagle 2 lander was funded through a partnership arrangement involving the Open University, EADS-Astrium, the DTI, the Particle Physics and Astronomy Research Council (PPARC), the Office of Science and Technology and ESA. Funding also came from the National Space Science Centre and the Wellcome Foundation. UK principal investigators for Beagle 2 came from the Open University (gas analysis package), Leicester University (environmental sensors and x-ray spectrometer) and Mullard Space Science Laboratory (imaging systems).— ESA[12]
The budget was secret at that time but has been estimated to be between 30 and 50 million pounds, which at then current exchange rates would be about 43-71 million euros or 54-89 million USD.[13] New Scientist magazine reported a budget of 40 million pounds for Beagle 2,[14] and another outlet said 50 million pounds.[4] However, some of the work is known to have been donated or done at-cost.[4]
Spacecraft and subsystems

- Robotic arm and analysers
Beagle 2 has a robotic arm known as the Payload Adjustable Workbench (PAW), designed to be extended after landing. The arm is 109 cm long when fully extended, and it can reach about 70 cm to the nearest rocks. The PAW contains a pair of stereo cameras, a microscope (with a 6 micrometre resolution), a Mössbauer spectrometer, an X-ray spectrometer, a drill for collecting rock samples and a spot lamp. Rock samples were to be passed by the PAW into a mass spectrometer and gas chromatograph in the body of the lander - the GAP (Gas Analysis Package), to measure the relative proportions of different isotopes of carbon and methane. Since carbon is thought to be the basis of all life, these readings could have revealed whether the samples contained the remnants of living organisms. Atmospheric methane is another signature of existing life, although geological processes can also be a source.
- Mole
Beagle 2 is also equipped with a small sample retrieval tool named Planetary Undersurface Tool or PLUTO (nicknamed the mole), that would have been deployed by the robotic arm. PLUTO has a compressed spring mechanism designed to enable it to move across the surface at a rate of 20 mm per second and to burrow into the ground and collect a subsurface sample in a cavity in its tip. PLUTO is attached to the lander by a 3 m power cable which could be used as a winch to bring the sample back to the lander. It had the capability to burrow to depths down to 1.5 m.[15]
- Specifications
The lander has the shape of a shallow bowl with a diameter of 1 m and a depth of 0.25 m. The cover of the lander is hinged and folded open to reveal the interior of the craft which holds a UHF antenna, the 0.75 m long robot arm, and the scientific equipment. The main body also contains the battery, telecommunications, electronics, and central processor, heaters, and additional payload items (radiation and oxidation sensors). The lid itself should have unfolded to expose four disk-shaped solar arrays. The lander package has a mass of 69 kg at launch but the actual lander was only 33.2 kg at touchdown.
The ground segment was derived from the European Space Agency software kernel known as SCOS2000. In keeping with the low cost theme of the mission, the control software was the first of its type designed on a laptop computer.
Mission profile


Mars Express launched from Baikonur on 2 June 2003, at 17:45 UTC (18:45 BST). Beagle 2 was a Mars lander initially mounted on the top deck of the Mars Express Orbiter. It was released from the orbiter on a ballistic trajectory towards Mars on 19 December 2003. Beagle 2 coasted for six days after release and entered the Martian atmosphere at about 20,000 km/h, on the morning of 25 December. The lander was protected from the heat of entry by a heat shield coated with NORCOAT, an ablating material made by EADS. Compression of the Martian atmosphere and radiation from the hot gas are estimated to have led to a peak heating rate of around 100 W/cm².
After deceleration in the Martian atmosphere, parachutes deployed, and at about 200 m above the surface large airbags inflated around the lander to protect it when it hit the surface. Landing occurred at about 02:45 UT on 25 December 2003 (9:45 p.m. EST 24 December). After analysis of the imagery obtained in 2015, it has been conjectured that after landing, the bags deflated and the top of the lander opened. However these images suggest that at most only two of the four solar panels deployed. A signal was supposed to be sent to Mars Express after landing and another the next (local) morning to confirm that Beagle 2 survived the landing and the first night on Mars. A panoramic image of the landing area was then supposed to be taken using the stereo camera and a pop-up mirror, after which the lander arm would have been released. The lander arm was to dig up samples to be deposited in the various instruments for study, and the "mole" would have been deployed, crawling across the surface to a distance of about 3 metres from the lander and burrowing under rocks to collect soil samples for analysis.
The British government spent more than £22 million (US$40 million) on Beagle 2, with the remainder of the total £44 million (US$80 million) coming from the private sector.[17]
Mission failure
Although the Beagle 2 craft successfully deployed from the Mars Express "mother ship", confirmation of a successful landing was not forthcoming. It should have come on 25 December 2003, when Beagle 2 was to have contacted NASA's 2001 Mars Odyssey spacecraft that was already in orbit. In the following days, the Lovell Telescope at Jodrell Bank also failed to pick up a signal from Beagle 2. The team said they were "still hopeful" of finding a successful return signal.
Attempts were made throughout January and February 2004 to contact Beagle 2 using Mars Express. The first of these occurred on 7 January 2004, but ended in failure. Although regular calls were made, particular hope was placed on communication occurring on 12 January, when Beagle 2 was pre-programmed to expect the Mars Express probe to fly overhead, and on 2 February, when the probe was supposed to resort to the last communication back-up mode: Auto-transmit. However, no communication was ever established with Beagle 2. Beagle 2 was declared lost on 6 February 2004, by the Beagle 2 Management Board. On 11 February, ESA announced an inquiry would be held into the failure of Beagle 2.[18]
On 20 December 2005 Pillinger released specially processed images from the Mars Global Surveyor which suggested that Beagle 2 had come down in a crater at the landing site on Isidis Planitia.[19] It was claimed that the blurry images showed the primary impact site as a dark patch and, a short distance away, Beagle 2 surrounded by the deflated airbags and with its solar panels extended.[20] However, Mars Reconnaissance Orbiter's HiRISE camera subsequently imaged the area in February 2007, and revealed that the crater was empty.[21]
Pillinger speculated[22] that higher than expected levels of dust in the Martian atmosphere, which captures heat, caused it to expand and reduce in density, so that the parachutes were not able to slow the probe sufficiently. This would cause the landing to be too hard, damaging or destroying the probe. A number of other failure hypotheses were produced at the time.[23] If the Martian atmosphere was thinner than expected, that would have reduced the parachute's effectiveness and therefore caused the lander to "plummet" and hit the surface with enough speed to destroy it.[23] Turbulence in the atmosphere, which would affect the parachute, was also examined.[23]
Failures in missions to Mars are common. As of 2010, of 38 launch attempts to reach the planet, only 19 have succeeded. Failures are sometimes informally called the Mars Curse.
ESA/UK inquiry report

In May 2004, the report from the Commission of Inquiry on Beagle 2 was submitted to ESA and the UK's science minister Lord Sainsbury.[24] Initially the full report was not published on the grounds of confidentiality, but a list of 19 recommendations was announced to the public.
David Southwood, ESA's Director of Science, provided four scenarios of possible failures:
- Beagle entered in atmospheric conditions outside the range assumed by its designers and could have burnt up. The scenario that it may have "bounced off into space" has been put forward but this does not stand up to close technical scrutiny. The amount of dust in the atmosphere often varies widely, changing its density and temperature characteristics. However, the chosen margins on the design of the heat shield and the thermal loads it can withstand are such that the burn-up scenario is unlikely, and even the worst case density variations certainly are not such that, given the steep entry flight path angle at entry, the craft could conceivably have left the atmosphere again (see also Section 6.1 of the Inquiry Report, which states explicitly: "the Commission concludes that deviation of the atmospheric entry conditions is not a probable failure mode of the mission");
- The probe's parachute or cushioning airbags failed to deploy or deployed at the wrong time. This is supported by the observation that throughout the transfer to Mars, the outgassing of some substance and subsequent condensation on optical components of the Mars Express spacecraft carrying the Beagle lander was observed. This observation would be consistent with a leak in the gas generators of Beagle's airbags;
- Beagle's backshell tangled with the parachute preventing it from opening properly. It is not clear whether the difference in air drag between the probe with the parachute deployed and the back shell of the heat shield is sufficient to guarantee a safe separation distance (see Section 5.4.4 of the Inquiry Report);
- Beagle became wrapped up in its airbags or parachute on the surface and could not open. Entanglement with the parachute appears plausible in view of the fact that the parachute's strop was shortened from the original design to save mass. Assuming that the airbags deployed, Beagle would, in the scenario, have bounced off the surface right back into the descending parachute (see also Section 5.4.6 of the Inquiry Report).
In addition, further scenarios appeared plausible and consistent with the available body of data:
- Beagle may have jettisoned its airbags too early, before it had come to a complete rest on the surface. For mass and cost reasons, the airbag jettison device was designed to be triggered by a timer rather than by acceleration sensors that would have discerned when the lander package had stopped moving. Given that the landing package of NASA's Spirit rover mission rebounded off the surface in Gusev crater numerous times before coming to a standstill – taking much more time than anticipated – Beagle's timer may have been set to a too short time (see Section 5.4.8 of the Inquiry Report);
- The parachute deployment sequence was designed to be triggered by three accelerometers. The system was not designed for a "best out of three" logic. Rather, the first accelerometer to compute that a safe deployment velocity had been reached would trigger the parachute deployment sequence, even if the accelerometer readout were faulty.
In February 2005, following comments from the House of Commons Select Committee on Science and Technology, the report was made public, and Leicester University independently published a detailed mission report, including possible failure modes, and a "lessons learned".[25]
Discovery of Beagle 2 spacecraft on Mars (2015)



The location of Beagle 2 on Mars was unknown from late 2003 to early 2015. On 16 January 2015, more than eleven years after its loss and eight months after its pioneer Colin Pillinger died,[26] news sources confirmed that the lander had been located intact on the surface of Mars by NASA's Mars Reconnaissance Orbiter,[5][6][27] lying on the surface of Isidis Planitia at 11°31′35″N 90°25′46″E / 11.5265°N 90.4295°E,[28][29] about 5 km from the planned center of its landing zone.[7]
On 26 April 2016 new computer vision methods stacked multiple new images together to create a view of the small lander.[30] The technique called SRR allows improvement in resolution by taking multiple views, then doing intensive image processing of those images.[31] At the time it took up to 4 days on the fastest available computers to compute one improved image from five 1000 by 2000 pixel images.[31]
Imaging analysis appears to show the probe on the surface and partially deployed, in the expected landing area, with objects that have been interpreted as being its parachute and back cover nearby. Although several interpretations of the image are possible, all involve, at most, incomplete deployment of the probe's solar panels. Images suggest that one of the "petals" on which the solar panels of the lander are mounted failed to fully open, preventing deployment of its radio antenna and blocking communication.[5][6][27][32] As the probe's antenna is beneath the last panel, it would have been unable to transmit or receive in such a configuration, so it would have been beyond recovery even if its systems were still operational, which is not known. Possible failure scenarios include mechanical damage during landing, fouling the deployment mechanism, or obstruction of the panels by an airbag.
Eleven years after the landing, the ESA had this to say about the finding:[33]
... Beagle 2 made it to the surface. This vindicates the engineering team's approach to landing on Mars.— ESA's Director of Science and Robotic Exploration[4]
At a news conference in London, the UKSA noted:
Beagle 2 is no longer lost— Chief executive of UK Space Agency, 2015[34]
Follow-on mission proposals
Some features of the Beagle 2 mission design have been proposed to be reused on other mission concepts:[35]
- Beagle 2007[35]
- Beagle 2e Evolution[35] (Beagle 3)
- BeagleNet (multiple Beagles and a mini-rover)[35]
- Beagle to the Moon[36]
- ARTEMIS (multiple small Mars landers)[35]
- MARGE[35] (reuse an instrument)
Possible surface operations
After it was found, likely intact and with some but not all panels deployed, what happened has been re-evaluated since its 2015 discovery.[4] Because the early phase of mission ran on battery power its possible some data was recorded to memory even if it could not get power from its panels.[4] If so it might be possible to retrieve the data eventually.[4] Also, study of what happened has revealed that Beagle 2 may have gone into its pre-programmed surface operations mode and collected data after landing, it just did not transmit it, or the transmission was blocked by a closed panel.[37] More operations might be possible with some solar arrays deployed, thus it would be able to have more energy then just the battery.[37]
See also
- ExoMars Programme
- ExoMars Schiaparelli lander in 2016
- ExoMars rover in 2020
- Life on Mars
- List of missions to Mars
- Viking landers, previous life-detection Mars landers from the 1970s
- List of artificial objects on Mars
- Exploration of Mars
References
- ↑ Bell, Edwin (26 August 2014). "Beagle 2". National Space Science Data Center. Retrieved 22 January 2015.
- ↑ Randell Rafkin, Scot C.; Michaels,, Timothy I.; Haberle, Robert M. (15 January 2004). "Meteorological predictions for the Beagle 2 mission to Mars" (PDF). Geophysical Research Letters. 31. doi:10.1029/2003GL018966. Retrieved 2016-11-03.
MGCM results are used to characterize the large-scale atmospheric fields over the primary mission (approximately 180 sols
- 1 2 Beagle2: FAQ.
- 1 2 3 4 5 6 7
- 1 2 3 4 Webster, Guy (16 January 2015). "'Lost' 2003 Mars Lander Found by Mars Reconnaissance Orbiter". NASA. Retrieved 16 January 2015.
- 1 2 3 "Mars Orbiter Spots Beagle 2, European Lander Missing Since 2003". New York Times. Associated Press. 16 January 2015. Retrieved 17 January 2015.
- 1 2 "UK-led Beagle 2 lander found on Mars". UK Space Agency. 16 January 2015. Retrieved 2016-11-03.
- 1 2 Sims, M. R. (2004). Beagle 2 Mission Report. Leicester UK: University of Leicester. p. 1. ISBN 1898489351.
- ↑ Beagle 2: Industry partners
- ↑ McLaren nears Mars. GP Update, 22 December 2003.
- ↑ The Beagle has Landed! UK National Space Center. January 15, 2015.
- 1 2
- ↑
- ↑
- ↑ Beagle 2: FAQs
- ↑
- ↑ Wardell, Jane (24 May 2004). "Beagle Mission Hampered by Funding, Management Problems". Space.com. Associated Press. Archived from the original on 23 May 2009. Retrieved 22 April 2009.
- ↑ "UK and ESA announce Beagle 2 inquiry". ESA. 11 February 2004.
- ↑ "Possible evidence found for Beagle 2 location". ESA. 21 December 2005. Retrieved 2009-04-22.
- ↑ Ghosh, Pallab (20 December 2005). "Beagle 2 probe 'spotted' on Mars". BBC News. Retrieved 22 April 2009.
- ↑ "Portion of Beagle 2 Landing Ellipse in Isidis Planitia (PSP_002347915)". HiRISE. University of Arizona. 26 January 2007. Retrieved 22 April 2009.
- ↑ Private conversation with Colin Pillinger, 2007
- 1 2 3 Hogan, Jenny (8 March 2004). "Beagle 2 may have sped to its death". New Scientist. Reed Business Information Ltd. Archived from the original on 18 March 2004.
- ↑ Bonnefoy, R.; Link, D.; Casani, J.; Vorontsov, V.A.; Engstrom, F.; Wolf, P.; Jude, R.; Patti, B. & Jones, C. (5 April 2005). "Beagle 2 ESA/UK Commission of Inquiry" (PDF). ESA and UK Ministry of Science and Innovation. Archived from the original (PDF) on 27 March 2009. Retrieved 22 April 2009.
- ↑ "Beagle 2 Mission Report and Lessons Learned". University of Leicester. 20 August 2004. Retrieved 2016-11-03.
- ↑ "Colin Pillinger dies after brain haemorrhage". BBC Online. 8 May 2014. Retrieved 8 May 2014.
- 1 2 Amos, Jonathan (16 January 2015). "Lost Beagle 2 probe found 'intact' on Mars". BBC. Retrieved 16 January 2015.
- ↑ Ellison, Doug (16 January 2015). "Beagle 2 location on Mars". Twitter & JPL. Retrieved 19 January 2015.
- ↑ Grecicius, Tony & Dunbar, Brian (16 January 2015). "Components of Beagle 2 Flight System on Mars". NASA. Retrieved 18 January 2015.
- ↑ Wall, Mike (April 26, 2016). "Supersharp Mars Photos Show UK's Long-Lost Beagle 2 Lander". Space.com.
- 1 2
- ↑ Katz, Gregory (16 January 2015). "Missing Mars Lander Found!". Huffington Post. Retrieved 17 January 2015.
- ↑ https://www.theguardian.com/science/2015/jan/16/lost-beagle-2-spacecraft-found-mars
- ↑
- 1 2 3 4 5 6 Gibson, E. K.; Pillinger, C. T.; Wright, I.P.; Hurst, S.J.; Richter, L. & Sims, M.R. (June 2012). How do you answer the life on Mars question? Use multiple small landers like Beagle 2 (PDF). Concepts and Approaches for Mars Exploration (2012). Houston, Texas. (2nd to last paragraph on second page)
- ↑ Randerson, James (23 September 2007). "New chance for Beagle as Nasa favours mission to the moon". The Guardian.
- 1 2
Mars map
External links
| Wikimedia Commons has media related to Beagle 2. |
- Official website
- Mars Express
- Beagle 2 Mission Profile by NASA's Solar System Exploration
- BBC guide to Beagle 2
- University of Leicester Mission Report and Lessons Learned
- NSSDC - Beagle 2
- Mars Express Operations
| Spacecraft | | |
|---|---|---|
| Instruments | ||
| Related Spacecraft |
| |
| Current |   .jpg) .jpg) | ||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Past |
| ||||||||||||||||||
| Failed at launch | |||||||||||||||||||
| Planned |
| ||||||||||||||||||
| Proposed | |||||||||||||||||||
| Cancelled / concepts | |||||||||||||||||||
| Related |
| ||||||||||||||||||
† indicates failure en route or before intended mission data returned. | |||||||||||||||||||
| Disciplines | |||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Topics |
| ||||||||||||||||||
| Space missions |
| ||||||||||||||||||
| Related | |||||||||||||||||||
| |||||||||||||||||||